Johdatus ohjausjärjestelmiin: toiminta, tyypit ja sovellukset
Käytät ohjausjärjestelmiä aina, kun kone pitää arvon automaattisesti tasaisena, kuten lämpötilan, nopeuden tai tason.Tässä artikkelissa kerrotaan, mikä ohjausjärjestelmä on, kuinka sen osat toimivat yhdessä ja kuinka palaute pitää tulostuksen oikeana.Näet myös järjestelmien päätyypit ja kuinka ne käyttäytyvät toiminnassa.Yleiset käyttötavat, edut ja rajoitukset sisältyvät.Katalogi

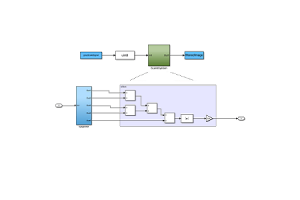
Kuva 1. Esimerkki ohjausjärjestelmästä
Mikä on ohjausjärjestelmä?
Ohjausjärjestelmä on järjestelmä, joka pitää mitatun arvon lähellä haluttua tavoitearvoa.Sen tarkoituksena on säätää prosessia automaattisesti niin, että tulos pysyy oikeana, vaikka olosuhteet muuttuvat.Esimerkiksi huonetermostaatti pitää lämpötilan lähellä asetettua tasoa ja auton vakionopeussäädin pitää ajoneuvon valitulla nopeudella.Vesisäiliön pinnankorkeuden säädin pitää myös veden korkeuden valitussa merkissä.Yksinkertaisesti sanottuna ohjausjärjestelmä tarkistaa ja korjaa jatkuvasti muuttujaa vastaamaan vaadittua arvoa.
Ohjausjärjestelmän peruselementit

Kuva 2. Ohjausjärjestelmän lohkokaavio
Ohjausjärjestelmä koostuu useista vakio-osista, joista jokainen suorittaa tietyn tehtävän.
• Referenssitulo (asetuspiste)
Tämä on haluttu arvo, jonka järjestelmä yrittää säilyttää.Se edustaa valittua kohdeehtoa.Järjestelmä vertaa aina todellista arvoa tähän viitearvoon.
• Aktivoiva signaali
Tämä on signaali, joka syntyy halutun ja todellisen arvon vertailun jälkeen.Se kertoo, kuinka paljon säätöä tarvitaan.Signaali valmistelee järjestelmän korjausta varten.
• Ohjauselementit
Nämä osat hoitavat päätöksentekoprosessin.Ne määrittävät korjaustoimenpiteet vastaanotetun signaalin perusteella.Tämän vaiheen tulos valmistaa prosessin säätöä varten.
• Manipuloitu muuttuja
Tämä on säädettävä määrä, joka lähetetään prosessiin.Tämän arvon muuttaminen vaikuttaa lopputulokseen.Se on muuttuja, jota järjestelmä voi suoraan vaihdella.
• Kasvi
Laitos on prosessi, jota ohjataan.Se tuottaa lopullisen lähtöarvon.Järjestelmä pyrkii pitämään tämän tehon halutulla tasolla.
• Häiriö
Tämä on ei-toivottu muutos, joka vaikuttaa prosessiin.Se voi työntää lähdön pois halutusta arvosta.Järjestelmän on kompensoitava se.
• Ohjattu muuttuja (lähtö)
Tämä on prosessin todellinen mitattu tulos.Se näyttää järjestelmän nykyisen tilan.Tavoitteena on pitää se yhtä suurena kuin referenssisyöte.
• Palauteelementit
Nämä mittaavat lähdön ja lähettävät tiedot takaisin tarkistettavaksi.Ne tarjoavat järjestelmälle nykyisen tilan.Tämä mahdollistaa korjauksen määrittämisen.
• Palautesignaali
Tämä on palautettu tieto lähtöarvosta.Se edustaa prosessin tilaa.Järjestelmä käyttää sitä vertailuun.
Ohjausjärjestelmän toimintaperiaate

Kuva 3. Ohjausjärjestelmän toimintaperiaate
Ohjausjärjestelmän toimintaperiaate alkaa siitä, että järjestelmälle annetaan haluttu syöttöarvo.Sitten järjestelmä vertaa tätä arvoa todelliseen lähtöarvoon.Niiden välistä eroa kutsutaan virhesignaaliksi.Jos virhe on olemassa, järjestelmä tuottaa korjaussignaalin.Tämä korjaus säätää prosessia virheen vähentämiseksi.Lähtö muuttuu ja sitä tarkistetaan jatkuvasti.Jakso toistuu, kunnes tulos vastaa tarkasti haluttua arvoa.
Ohjausjärjestelmien ominaisuudet
Ohjausjärjestelmiä arvioidaan sen perusteella, kuinka hyvin ne toimivat käytön aikana.Nämä ominaisuudet kuvaavat järjestelmän vasteen laatua ja luotettavuutta.
|
Ominaisuudet |
Kuvaus |
|
Vakaus |
Lähtö tekee
eivät eroa;palaa tasaiseen arvoon häiriön jälkeen |
|
Tarkkuus |
Lopullinen virhe ≤
±2–5 % asetetusta arvosta |
|
Tarkkuus |
Lähtö
vaihtelu ≤ ±1 % samalla tulolla |
|
Vastausaika
|
Alkuperäinen
reaktio tapahtuu mitatun viiveajan (td) sisällä |
|
Nousuaika |
Aika alkaen 10 %
90 prosenttiin lopullisesta arvosta |
|
Laskeutumisaika |
Sisään ja
pysyy ±2 %:n alueella |
|
Ylitys |
Huippu ylittää
lopullinen arvo prosentteina |
|
Vakaa tila
Virhe |
Jatkuva
stabiloinnin jälkeen jäljellä oleva offset |
|
Herkkyys |
Δlähtö /
Δ Parametrien muutossuhde |
|
Vahvuus |
Ylläpitää
toimii häiriömuutoksesta huolimatta |
|
Kaistanleveys |
Toimii
tehokkaasti jopa -3 dB rajataajuudella |
|
Toistettavuus |
Sama sisääntulo
tuottaa saman tuloksen toleranssin sisällä |
|
Luotettavuus |
Toimii
ilman vikaa nimelliskäyttöajalle (MTBF) |
|
Vaimennus |
Värähtely
vaimeneminen määritettynä vaimennussuhteella ζ |
|
Nopeus
Vastaus |
Aikaa yhteensä
saavuttaa vakaan tilan |
Ohjausjärjestelmien tyypit
Ohjausjärjestelmät luokitellaan sen mukaan, miten ne käsittelevät tietoa, signaaleja ja vastauskäyttäytymistä.Ne on ryhmitelty palautteen käytön, signaalimuodon ja matemaattisen käyttäytymisen mukaan.
Avoimen silmukan ohjausjärjestelmä
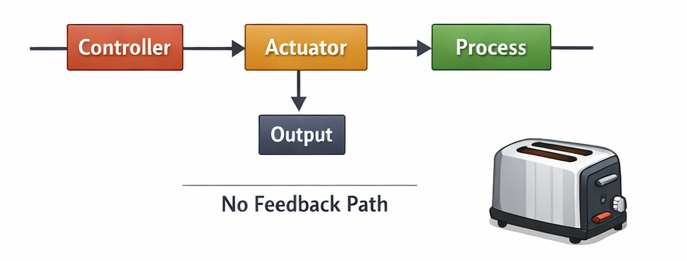
Kuva 4. Avoimen silmukan ohjausjärjestelmäkaavio
Avoimen silmukan ohjausjärjestelmä on järjestelmä, jossa lähtö ei vaikuta ohjaustoimintoon.Järjestelmä lähettää komennon ja olettaa tuloksen oikeaksi tarkistamatta sitä.Koska palautepolkua ei ole, se ei voi automaattisesti korjata virheitä tai häiriöitä.Suorituskyky riippuu pääasiassa oikeasta kalibroinnista ja käyttöolosuhteista.Nämä järjestelmät ovat yksinkertaisia, edullisia ja helppoja suunnitella.Kuorman tai ympäristön muutokset voivat kuitenkin vaikuttaa lopputulokseen.Yleisiä esimerkkejä ovat sähköinen leivänpaahtimen ajastin, pesukoneen ajastin ja kiinteä kasteluajastin.
Suljetun silmukan ohjausjärjestelmä
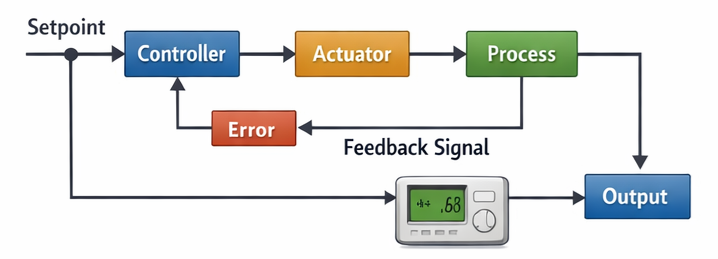
Kuva 5. Suljetun silmukan ohjausjärjestelmän kaavio
Suljetun silmukan ohjausjärjestelmä on järjestelmä, joka säätää lähtöään automaattisesti takaisinkytkennän avulla.Järjestelmä mittaa tuloksen ja vertaa sitä haluttuun arvoon.Jos ero ilmenee, käytetään korjausta virheen vähentämiseksi.Tämä jatkuva säätö mahdollistaa tarkan ja vakaan toiminnan, vaikka olosuhteet vaihtelevat.Suljetun silmukan järjestelmät tarjoavat paremman tarkkuuden ja luotettavuuden kuin avoimen silmukan järjestelmät.Niitä käytetään laajalti nykyaikaisissa automaattisissa ohjaussovelluksissa.Tyypillisiä esimerkkejä ovat ilmastointilaitteen lämpötilan säätö, ajoneuvon vakionopeudensäädin ja automaattiset jännitesäätimet.
Jatkuvan ajan ohjausjärjestelmä

Kuva 6. Jatkuvan ajan (analoginen) ohjaussignaali
Jatkuvaaikainen ohjausjärjestelmä käsittelee signaaleja, jotka muuttuvat sujuvasti ajan myötä.Tulo ja lähtö ovat olemassa joka hetkessä keskeytyksettä.Nämä järjestelmät toimivat yleensä analogisten sähköisten tai mekaanisten signaalien kanssa.Koska signaalit ovat jatkuvia, myös vaste on tasainen ja luonnollinen.Jatkuvaaikajärjestelmiä löytyy yleisesti perinteisistä analogisista ohjaimista.Ne soveltuvat fysikaalisiin prosesseihin, jotka vaativat välitöntä reagointia.Esimerkkejä ovat analogiset nopeudensäätimet, äänivahvistimen äänenvoimakkuuden säätö ja hydrauliventtiilin asennon säätö.
Diskreettiaikainen ohjausjärjestelmä

Kuva 7. Diskreettiaikainen (digitaalinen) ohjaussignaali
Diskreettiaikainen ohjausjärjestelmä toimii näytteistetyillä datasignaaleilla.Järjestelmä tarkistaa ja päivittää arvot vain tietyin aikavälein.Nämä signaalit käsitellään yleensä digitaalisilla ohjaimilla tai mikroprosessoreilla.Tulos muuttuu asteittain eikä jatkuvasti.Tällaiset järjestelmät mahdollistavat ohjelmoitavan toiminnan ja joustavan säädön.Niitä käytetään laajalti nykyaikaisessa elektronisessa ja tietokonepohjaisessa ohjauksessa.Esimerkkejä ovat mikrokontrolleriin perustuva lämpötilansäätö, digitaalinen moottorin nopeudensäätö ja älykkään kodin termostaatit.
Lineaarinen ohjausjärjestelmä
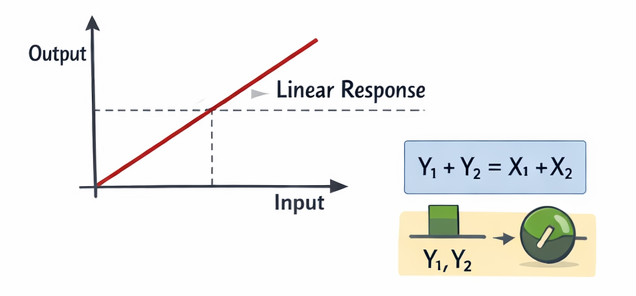
Kuva 8. Lineaarinen järjestelmän tulo-lähtösuhde
Lineaarinen ohjausjärjestelmä seuraa suhteellista suhdetta tulon ja lähdön välillä.Jos tulo kaksinkertaistuu, myös lähtö kaksinkertaistuu samoissa olosuhteissa.Nämä järjestelmät täyttävät superpositioperiaatteen, jossa yhdistetyt syötteet tuottavat yhdistettyjä tuotoksia.Lineaarinen käyttäytyminen mahdollistaa ennustettavan ja helpon matemaattisen analyysin.Useimmat teoreettiset ohjaussuunnitelmat olettavat lineaarista toimintaa yksinkertaisuuden vuoksi.Lineaariset mallit auttavat suunnittelemaan vakaita ja tarkkoja järjestelmiä.Esimerkkejä ovat pienisignaaliset elektroniset vahvistimet ja pienikuormitetut moottorin ohjausalueet.
Epälineaarinen ohjausjärjestelmä
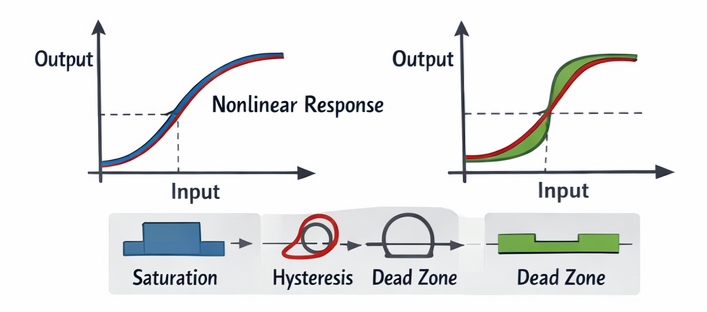
Kuva 9. Epälineaariset järjestelmän vasteominaisuudet
Epälineaarisella ohjausjärjestelmällä on lähtö, joka ei ole verrannollinen tuloon.Reaktio muuttuu toiminta-alueen tai olosuhteiden mukaan.Pienet syöttömuutokset voivat aiheuttaa suuria tulosvaihteluita tai ilman muutoksia.Usein esiintyy vaikutuksia, kuten kylläisyyttä, hystereesiä ja kuolleita alueita.Näitä järjestelmiä on vaikeampi analysoida, mutta ne kuvaavat fyysisiä prosesseja tarkemmin.Monet järjestelmät käyttäytyvät luonnollisesti epälineaarisesti.Esimerkkejä ovat robottivarren liikerajat, magneettisen toimilaitteen käyttäytyminen ja venttiilin virtauksen ohjaus ääriasennoissa.
Ohjausjärjestelmien edut ja haitat
Ohjausjärjestelmät parantavat johdonmukaisuutta ja vähentävät manuaalista työtä, mutta lisäävät myös monimutkaisuutta ja kustannuksia.
Ohjausjärjestelmien edut
• Järjestelmä pitää tehon lähellä vaadittua arvoa käytön aikana.
• Käyttäjien ei tarvitse jatkuvasti säätää laitetta käsin.
• Koneet voivat toimia pitkiä tunteja ilman jatkuvaa pysähtymistä.
• Järjestelmä korjaa olosuhteiden muutokset automaattisesti.
• Toimintatilan voi tarkistaa paneelista tai etänäytöstä.
Ohjausjärjestelmien haitat
• Asennuskustannukset ovat korkeammat kuin yksinkertaiset manuaaliset järjestelmät.
• Asennuksiin ja huoltoon tarvitaan ammattitaitoisia työntekijöitä.
• Anturit ja elektroniset osat voivat epäonnistua ajan myötä.
• Ongelmien syyn selvittäminen voi kestää kauemmin.
• Järjestelmä on riippuvainen vakaasta sähkötehosta.
Ohjausjärjestelmien sovellukset
Ohjausjärjestelmiä käytetään sekä teollisuusautomaatiossa että päivittäisissä laitteissa oikean toiminnan ylläpitämiseksi automaattisesti.
1. Teollinen valmistus
Tuotantokoneet säilyttävät yhtenäiset tuotteen mitat ja laadun.Automaattiset kokoonpanolinjat käyttävät säätöä toistettavuuden varmistamiseksi.Tämä vähentää hukkaa ja parantaa tehokkuutta.
2. Lämpötilan säätö
Lämmitys- ja jäähdytyslaitteet ylläpitävät mukavat ympäristöolosuhteet.Rakennukset luottavat automaattiseen säätöön sisäilman vakauttamiseksi.Tämä parantaa energiatehokkuutta ja mukavuutta.
3. Kuljetusjärjestelmät
Ajoneuvot käyttävät nopeuden ja vakauden hallintaa tasaisemman toiminnan takaamiseksi.Nykyaikaisissa autoissa on vakionopeussäädin ja vetojärjestelmä.Nämä parantavat ajoturvallisuutta ja suorituskykyä.
4. Sähköjärjestelmät
Sähköverkot säätelevät jännite- ja taajuustasoja.Generaattorit säätävät tehoa vastaamaan kuormituksen kysyntää.Tämä varmistaa vakaan sähkönsyötön.
5. Robotiikka ja automaatio
Robotit suorittavat tarkkoja paikannus- ja liiketehtäviä.Automaattiset koneet toimivat jatkuvasti suurella tarkkuudella.Tämä mahdollistaa edistyneen valmistuksen.
6. Lääketieteelliset laitteet
Laitteet ylläpitävät kontrolloituja toimintaolosuhteita hoidon aikana.Valvontalaitteet pitävät arvot turvallisissa rajoissa.Tämä parantaa potilasturvallisuutta ja luotettavuutta.
7. Kodinkoneet
Päivittäiset laitteet hallitsevat toimintaasetuksia automaattisesti.Pesukoneet ja jääkaapit ylläpitävät asianmukaisia toimintaolosuhteita.Tämä yksinkertaistaa päivittäisiä tehtäviä.
8. Ilmailujärjestelmät
Lentokoneet ja droonit ylläpitävät vakaat lento-olosuhteet.Automaattinen opastus pitää oikean suunnan ja korkeuden.Tämä tukee luotettavaa navigointia.
Ohjausjärjestelmä vs automaatio vs sulautetut järjestelmät
Nämä tekniikat liittyvät läheisesti toisiinsa, mutta ne palvelevat erilaisia teknisiä tarkoituksia nykyaikaisissa elektroniikka- ja teollisuustuotteissa.
|
Ominaisuus |
Ohjaus
Järjestelmä |
Automaatio |
Upotettu
Järjestelmä |
|
Pääpainopiste |
asetuksen
muuttujia |
Prosessi
teloitus |
Laite
toimintaa |
|
Tarkoitus |
ylläpitää
haluttu arvo |
Suorita tehtäviä
automaattisesti |
Juokse omistettuna
toimintoja |
|
Laajuus |
Erityinen
prosessikäyttäytymistä |
Kokonainen
työnkulku
|
Sinkku
tuotteen laite |
|
Päätös
Kyky |
Perustuu
mitatut arvot |
Perustuu
ohjelmoitua logiikkaa |
Perustuu
laiteohjelmisto |
|
Palaute Käyttö |
Usein
tarvitaan |
Valinnainen |
Valinnainen |
|
Laitteiston tyyppi |
Anturit ja
toimilaitteet |
Koneet ja
ohjaimia |
Mikro-ohjain
hallitus |
|
Ohjelmiston rooli |
Laskeminen
ja korjaus |
Sekvensointi
ja koordinointi |
Laite
ohjauslogiikka |
|
Vastaustyyppi |
Jatkuva
säätö |
Tehtävä
teloitus |
Toimiva toiminta |
|
Järjestelmän koko |
Pieni
keskikokoinen |
Keskipitkällä
suuri |
Hyvin pieni |
|
Joustavuus |
Kohtalainen |
Korkea |
Rajoitettu |
|
Aika
Vaatimus |
Korkea |
Kohtalainen |
Korkea |
|
Sovellus
Taso |
Prosessin taso |
Kasvin taso |
Tuotetaso |
|
Esimerkki |
Lämpötila
ohjata |
Tehdas
tuotantolinja |
Älykäs kello |
|
Integrointi |
Osa
automaatio |
Sisältää
ohjausjärjestelmät |
Tukee molempia |
Johtopäätös
Ohjausjärjestelmät ylläpitävät vakautta vertaamalla jatkuvasti todellista tehoa tavoitearvoon ja korjaamalla mahdolliset virheet.Niiden suorituskyky riippuu ydinelementeistä, kuten palautteesta, ohjaimen toiminnasta ja ohjatusta prosessista.Eri luokitukset määrittelevät, kuinka signaaleja käsitellään ja kuinka tarkasti järjestelmä reagoi häiriöihin.Näiden ominaisuuksien ansiosta ohjausjärjestelmiä käytetään laajalti teollisuudessa, liikenteessä, energiassa, lääketieteellisissä laitteissa ja jokapäiväisissä laitteissa.
Meistä
ALLELCO LIMITED
Lue lisää
Nopea kysely
Lähetä kysely, vastaamme heti.
Usein Kysytyt Kysymykset [FAQ]
1. Mitä eroa on ohjaimella ja ohjausjärjestelmällä?
Säädin on vain päätöksentekolaite (kuten PLC- tai PID-ohjain).Ohjausjärjestelmä sisältää säätimen sekä anturit, toimilaitteet ja säädettävän prosessin.
2. Mitä on PID-säätö ja miksi se on tärkeää?
PID-säätö käyttää suhteellisia, integraalisia ja derivatiivisia toimintoja virheiden minimoimiseksi nopeasti ja sujuvasti.Se parantaa vakautta, tarkkuutta ja vastenopeutta useimmissa teollisuusjärjestelmissä.
3. Miksi ohjausjärjestelmät joskus värähtelevät tai metsästävät?
Värähtelyä tapahtuu, kun korjaukset ovat liian aggressiivisia tai viivästyneitä.Huono viritys, hitaat anturit tai liiallinen vahvistus aiheuttavat lähdön toistuvan ylityksen.
4. Mikä on toimilaitteen saturaatio?
Toimilaitteen kyllästyminen tapahtuu, kun toimilaite saavuttaa fyysisen rajansa eikä voi lisätä tehoa enempää.Tämä estää järjestelmää korjaamasta suuria virheitä.
5. Miten ohjausjärjestelmät käsittelevät prosessien viiveitä?
He käyttävät viritysmenetelmiä, suodattimia tai ennustavia algoritmeja kompensoimaan viivettä, jotta korjaus tapahtuu oikeaan aikaan.

4,7 kΩ vastusopas: värikoodi, käyttötarkoitukset, testaus ja arvon vertailu
16.02.2026

Miniature Circuit Breaker (MCB): toimintaperiaate, tyypit, arvot ja valintaopas
15.02.2026
Suositut viestit
-

COMPLECT -ohjeet Tietokoneet: Kuinka ne muuttivat tietojenkäsittelyä?
18.04.8000 147778
-

USB-C-pinout ja ominaisuudet
18.04.2000 112027
-
Xilinx Unified Simulation Primitive -sovelluksen käyttäminen: Kattava opas FPGA: n suunnitteluun ja simulointiin
18.04.1600 111351
-

Virtalähteen jännitteet elektroniikassa: VCC:n, VDD:n, VEE:n, VSS:n ja GND:n merkitys
18.04.0400 83779
-

RJ45 Connector Guide: Pinout, johdotus, kaapelityypit ja käyttö
01.01.1970 79578
-

Lopullinen opas johdon värikoodiin nykyaikaisissa sähköjärjestelmissä
Tapa, jolla sähköjärjestelmämme käyttävät värejä, ei ole vain ulkonäölle.Jokainen lankaväri osoittaa nyt tietyn toiminnon, mikä helpottaa sähkökomponenttien tunnistamista ja käsittelyä oikein asenn...01.01.1970 66969
-

Puhdistusventtiilin opas: Toiminta, oireet, testaus ja korvaava moottorin optimaalinen suorituskyky
Puhdistusventtiili on keskeinen osa auton järjestelmää, joka auttaa pitämään ilman puhtaana hallitsemalla polttoainehöyryjä ennen kuin ne voivat paeta ilmakehään.Tämä ei vain auta ympäristöä vähent...01.01.1970 63107
-

Laatu (Q) tekijä: Yhtälöt ja sovellukset
Laatukerroin tai 'Q' on tärkeä tarkistettaessa, kuinka hyvin induktorit ja resonaattorit toimivat elektronisissa järjestelmissä, jotka käyttävät radiotaajuuksia (RF).'Q' mittaa kuinka hyvin piiri m...01.01.1970 63041
-

Huippututkinnon saavuttaminen suurimmalla tehonsiirtolauseella
Suurin virransiirtolause selittää, kuinka energia lähteestä, kuten akku tai generaattori, virtaa kytkettyyn kuormaan.Se näyttää tarkan tilan, jossa kuorma vastaanottaa eniten virtaa.Tämä artikkeli ...01.01.1970 54097
-

A23 -akun tekniset tiedot ja yhteensopivuus
A23-akku on pieni, sylinterimainen akku, jolla on korkea jännite.Kutsutaan myös 23a, 23ae tai MN21, se toimii 12 voltilla ja paljon korkeampi kuin AA- tai AAA -akut.Sen erityinen muotoilu ...01.01.1970 52191
Kuuma osanumero
-

ATA5279C-PLQW
Microchip Technology
IC PASS ENTRY 125KHZ 48VQFN
MCF51JU128VHS
NXP USA Inc.
IC MCU 32BIT 128KB FLSH 44MAPLGA
VN02HSP13TR
STMicroelectronics
IC PWR DRIVER N-CHAN 1:1 PWRSO10
UC2526AQ
Texas Instruments
IC REG CTRLR MULT TOP 20PLCC
IRG4BAC50W-S
Infineon Technologies
IGBT 600V 55A 200W SUPER 220
CM150RX-24S
Powerex Inc.
IGBT MOD 1200V 150A 1150W
CA3127MZ
Renesas Electronics America Inc
RF TRANS 5NPN 15V 1.15GHZ 16SOIC
ISL5829IN
Intersil
DAC, 2 FUNC, PARALLEL INPUT
AK6480AF
Asahi Kasei Microdevices/AKM
IC EEPROM 8KBIT SPI 1MHZ 8SOP
SMCJ130A
Bourns Inc.
TVS DIODE 130VWM 209VC SMC
MIC5201-3.0BM
Microchip Technology
IC REG LINEAR 3V 200MA 8SOIC
ATWILC1000B-MU-T
Microchip Technology
IC RF TXRX+MCU WIFI 40VFQFN
SRR1260-101M
Bourns Inc.
FIXED IND 100UH 1.7A 180MOHM SMD
P0640SDLRP
Littelfuse Inc.
THYRISTOR 58V 1KA DO214AA
NCP1117ST25T3G
onsemi
IC REG LINEAR 2.5V 1A SOT223
HVU202BTRU-E
Renesas Electronics America Inc
VARIABLE CAPACITANCE DIODE
ISL6614CBZ
Renesas Electronics America Inc
IC GATE DRVR HALF-BRIDGE 14SOIC
VI-274-MY
Vicor Corporation
DC DC CONVERTER 48V 50W -

KA2807
onsemi
IC GROUND FAULT INTERRUPTER 8DIP
MCP101T-475I/TT
Microchip Technology
IC SUPERVISOR 1 CHANNEL SOT23-3
TPS70933DBVT
Texas Instruments
IC REG LINEAR 3.3V 150MA SOT23-5
SMP100MC-400
STMicroelectronics
THYRISTOR 400V 300A DO214AA
1206AA300KAT1A
KYOCERA AVX
CAP CER 30PF 1KV NP0 1206
PT78HT205S
Texas Instruments
DC DC CONVERTER 5V
NCP1031MNTXG
onsemi
IC OFFLINE SWITCH MULT TOP 8DFN
S9S08SG32E1MTJ
NXP USA Inc.
IC MCU 8BIT 32KB FLASH 20TSSOP
XC7Z030-3FFG676E
AMD
IC SOC CORTEX-A9 1GHZ 676FCBGA
SN74AVCH2T45DCUR
Texas Instruments
IC TRANSLTR BIDIRECTIONAL 8VSSOP
PALCE16V8H-10PC/4
Lattice Semiconductor Corporation
EE PLD, 10NS, PAL-TYPE, CMOS
TS5A4596DCKR
Texas Instruments
IC SWITCH SPST-NOX1 8OHM SC70-5
FJAF6815TU
onsemi
TRANS NPN 750V 15A TO3PF
PCF51AC256BCFUE
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 64QFP
AQW212EHAZ
Panasonic Electric Works
SSR RELAY SPST-NO 500MA 0-60V
BA12003B
Rohm Semiconductor
IC DRIVER 7/0 16DIP
DL4936-13-F
Diodes Incorporated
DIODE GEN PURP 400V 1A MELF
C3216X7R2J333K160AA
TDK Corporation
CAP CER 0.033UF 630V X7R 1206 -

LTC1290BISW#PBF
Analog Devices Inc.
IC DAS/ADC 12BIT 50K 20SOIC
TV06B330J-G
Comchip Technology
TVS DIODE 33VWM 53.3VC DO214AA
AMS22S5P1BLBFL301
Bourns Inc.
SENSOR ROTARY 10DEG PC PIN
BC808-16
Diotec Semiconductor
TRANS PNP 25V 0.8A SOT23-3
CAT4003BTD-GT3
onsemi
IC LED DRV LIN MULT-STP TSOT23-6
TMP513AIRSAT
Texas Instruments
IC TEMP SNSR TRIPL REMOTE 16QFN
SN75110AN
Texas Instruments
IC DRIVER 2/0 14DIP
CY62128DV30LL-70SI
Infineon Technologies
IC SRAM 1MBIT PARALLEL 32SOIC
VI-J5L-CW
Vicor Corporation
DC DC CONVERTER 28V 100W
PCI4410APDV
Texas Instruments
IC INTEGRATED PC CARD 208-LQFP
TMS320F28034PAGQR
Texas Instruments
IC MCU 32BIT 128KB FLASH 64TQFP
OVP0921-B44G
OmniVision Technologies Inc
DISPLAY LCOS WIRELESS 144BGA
MAX5722EUA+T
Analog Devices Inc./Maxim Integrated
IC DAC 12BIT V-OUT 8UMAX
293D476X96R3B2TE3
Vishay Sprague
CAP TANT 47UF 10% 6.3V 1411
IXTP1R6N100D2
IXYS
MOSFET N-CH 1000V 1.6A TO220AB
TSB43AB23IPDTEP
Texas Instruments
IC IEEE-1394 CTRLR 128-TQFP
MPC8313CVRADDC
Freescale Semiconductor
POWERQUICC 32 BIT POWER ARCHITEC
UCC2813PW-3
Texas Instruments
IC REG CTRLR MULT TOP 8TSSOP