TB6600 Stepper -moottorin ohjain: Pinout, Arduino -rajapinta ja miten se toimii
Luettelo

Yleiskatsaus TB6600 Stepper -moottorimoduulista
Se TB6600 Stepper Motor Driver -moduuli on laite, joka eroaa sen joustavuudesta ja sopeutumiskyvystä 2-vaiheisen askelmoottorien ohjaamiseksi.Se yhdistyy saumattomasti laajaan joukkoon mikrokontrollereita, enimmäkseen Arduino, joka edistää tarkkojen 5 V: n digitaalisten pulssilähtöjen luomista.Nämä lähdöt ovat dynaamisia moottorin ohjauksen herkän tasapainon ylläpitämiseksi.Toiminnassa jännitealueella 9-42 V DC ja tukee huippuvirtaa 4 ampeeria, se on monipuolinen valinta erilaisille moottorivetoisille projekteille.Tämän sopeutumiskyvyn avulla voit hallita moottorin paikannusta ja nopeutta tehokkaasti, mikä on erittäin hyödyllistä sovelluksissa, joiden tarkoituksena on minimoida koodauksen monimutkaisuus.Moduulin korkeataajuinen optio-eristys parantaa merkittävästi sen luotettavuutta vähentämällä häiriöriskejä ja varmistamalla tasaisen toiminnan.
Harmonia lukuisten mikrokontrollerien kanssa tekee TB6600 -ohjaimesta sopivan valinnan hankkeille, jotka vaativat monimutkaista moottorin ohjausta.Se integroituu sujuvasti Arduinon kaltaisiin alustoihin, mikä heijastaa sen kykyä vastata monipuolisiin odotuksiin.Esimerkiksi tämän ohjaimen käyttäminen CNC -koneissa tai 3D -tulostimissa mahdollistaa tarkan ja ohjattavan liikkeen, joka kuvaa sen hyödyllisyyttä eri aloilla.
Tämä moduuli erottuu tukena sekä 2-vaiheisiin että 4-vaiheisiin askelmoottoreihin sekä hybridi-kokoonpanoihin.Bipolaarinen H-silta-suunnittelu on olennainen osa jännitteen ja virran tehokkaaseen hallintaan, mikä varmistaa, että kuljettaja tarjoaa huipputehokkuuden sovellustensa välillä.Ympäristöissä, joissa tarkkuus ja luotettavuus priorisoidaan, kuten automatisoidut tuotantolinjat ja robotiikka, nämä ominaisuudet arvostetaan voimakkaasti.
Piirteet
|
Ominaisuus |
Kuvaus |
|
Kuljettajatyyppi |
Bipolaarinen H-Bridge DC-ohjain |
|
Lähtövirtavaihtoehdot |
8 tyyppiä (0,5A - 3,5a), valittavissa jopa 4 ampeeriaan |
|
Alajakotilat |
Jaa jopa 32, valittavissa 6 tilasta |
|
Micro STEP -vaihtoehdot |
8 tyyppiä (1, 2/a, 2/b, 4, 8, 16, 32) |
|
Tulosignaalin eristäminen |
Nopea valosähköinen erotus |
|
Rajapinta |
Täysin vakio yksittäinen pulssirajapinta |
|
Offline -pidätystoiminto |
Kyllä |
|
Ympäristön soveltuvuus |
Puolisuluttu vartalo ankariin ympäristöihin |
|
Virranlukko -toiminto |
Puoliautomaattinen, energiansäästö |
Nastakokoonpano

Tekniset tiedot
|
Eritelmä |
Yksityiskohdat |
|
Käyttöjännite |
9-40 V DC |
|
Lähtövirta |
0.7A-4,0A (valittavissa 8 vaiheessa DIP-kytkimien kautta) |
|
Syöttöpulssitaajuus |
Jopa 20 kHz |
|
Tulosignaalin tasot |
5 V signaalitasot |
|
Pulssi vallankumousta kohti |
200-6400 |
|
Logiikan signaalivirta |
8a-15a |
|
Moottorin yhteensopivuus |
Soveltuu 2-vaiheiseen ja 4-vaiheiseen askelmoottoriin |
|
Suojaominaisuudet |
Ylikuumenemisen ylitys |
|
Tulon eristäminen |
Optisesti eristetty |
|
Eristyskestävyys |
500 Megohms |
|
Tuettu tila |
PUL/FIR -tila |
|
Maksaa |
Alhaiset kustannukset |
H-Bridge Circuit Configuration for TB6600
TB6600-askelmoottorin ohjainmoduuli on vakava komponentti, joka on suunniteltu hallitsemaan sekä 2-vaiheista että 4-vaiheista askelmoottoreita käyttämällä bi-polaarista H-Bridge-konfiguraatiota tehokasta toimintaa varten.Tässä kokoonpanossa käytetään MOSFET -transistoreita korkean suorituskyvyn varmistamiseksi nykyisen käsittelyn ja lämpöstabiilisuuden suhteen.Moduuli toimii vuorovaikutuksessa kahden ensisijaisen ohjaustapin kanssa: askeltappi, joka laukaisee moottorin askeleen jokaisella pulssilla, ja suuntatappi, joka määrittää moottorin pyörimissuunnan käytetyn jännitteen perusteella.Yhdessä nämä tulot mahdollistavat tarkan ohjauksen moottorin askeljaksosta ja pyörimissuunnasta.

Piirikaavio tuo esiin neljä avaintransistoria, T1, T2, T3 ja T4, jotka on järjestetty H-siltarakenteeseen.Nämä MOSFET: t ovat moduulin toiminnan selkäranka, mikä mahdollistaa askelmoottorin ajamiseen tarvittavan virran kaksisuuntaisen virtauksen.Lisäksi kaavio sisältää flyback -diodeja (D1, D2, D3 ja D4), jotka ovat avain piirin suojaamiseksi moottorin induktiivisen kuorman aiheuttamilta jännitepiikiltä.Nämä diodit estävät ylikuormituksen ja herkille komponenttien vauriot toiminnan aikana.A+, A-, B+ja B-liittimiä käytetään moottorin kytkemiseen varmistaen moottorin akselin tarkan ja ohjattavan liikkeen.
Kuinka H-silta mahdollistaa moottorin pyörimisen?
TB6600-ohjain toimii MOSFET-transistorien koordinoidun vaikutuksen kautta H-siltassa.Esimerkiksi:
• Myötäpäivään kierto tapahtuu, kun transistorit T1 ja T4 aktivoidaan, ohjaamalla virran virtausta A+: sta A-.
• Vastapäivään kierto tapahtuu, kun T2 ja T3 ovat kiinni, kääntäen virran virtauksen A- A+: een.
Tämä transistorien vuorotteleva aktivointi varmistaa sujuvan kaksisuuntaisen liikkeen.Optimaalisen vääntömomentin ja tehokkaan toiminnan saavuttamiseksi tarkka ajoitus ja jännitesäätely ovat välttämättömiä.
Monipuolisen ohjauksen toimintatavat
TB6600 tukee neljää erillistä toimintatapaa, jotka kukin on suunniteltu tasapainottamaan vääntömomenttia, tarkkuutta ja askelkokoa, sovellusvaatimuksista riippuen:
Olla Aaltotila: Tässä tilassa vain yksi kela on energinen kerrallaan.Yhden kelan aktivointi kiertää moottoria 90 astetta yhteen suuntaan samalla kun virta kääntää sitä vastakkaiseen suuntaan.Vaihtamalla kelojen välillä moottori saavuttaa jatkuvan toiminnan.Tämä tila on yksinkertainen, mutta tarjoaa vähemmän vääntömomenttia muihin tiloihin verrattuna.
Olla Koko vaiheen tila: Molemmat kelat virristetään samanaikaisesti tässä tilassa, mikä tuottaa vahvemman magneettikentän.Tämä johtaa lisääntyneeseen vääntömomenttiin, mikä tekee siitä ihanteellisen sovelluksille, jotka vaativat enemmän voimaa ja vakautta.
Olla Puolivaiheinen tila: Aaltotilan ja täysvaiheisen tilan yhdistelmä, tämä tila vuorottelee yhden kelan energisoinnin ja molemmat kelat.Se pienentää askelkoon tehokkaasti 45 asteeseen, mikä tarjoaa tasapainon tarkkuuden ja vääntömomentin välillä.Vääntömomentti voi kuitenkin vaihdella riippuen siitä, onko yksi tai molemmat kelat virran tietyn vaiheen aikana.
Olla Mikrotietotila : Tarkka kaikista moodista, MicroStep -tila pienentää askelkokoa entisestään moduloimalla virtaa huolellisesti moottorivaiheiden läpi.Tämä saavutetaan edistyneiden piirien avulla sujuvien ja asteittaisten siirtymien luomiseen vaiheiden välillä.Tämä tila on ihanteellinen sovelluksille, jotka vaativat suurta tarkkuutta ja johdonmukaista vääntömomenttia, kuten CNC -koneita tai robotiikkaa.
TB6600: n integrointi Arduino Unon kanssa
Stepper -moottorien tehokas hallinta vaatii luotettavan laitteiston ja huolellisesti ohjelmoidun ohjelmiston yhdistelmän.TB6600-askelmoottorin ohjain erottuu erinomaisena työkaluna 2-vaiheisen askelmoottorien käyttämiseen.Se tukee useita toimintatapoja, kuten aalto, täysi vaihe, puoli vaihe ja mikroaskel.Sen sisäänrakennetut suojausominaisuudet-mukaan lukien suojatoimenpiteet matalajännitteeltä, ylivirtailta ja ylikuumenemisilta-tekevät siitä vankan valinnan hankkeille, jotka vaativat tarkkuutta ja kestävyyttä.
Jos haluat asettaa TB6600: n Arduino UNO: lla, kerää seuraavat komponentit:
• Arduino UNO R3
• TB6600 askelmoottorin ohjain (4A -versio)
• Askelmoottori (suositellulla luokituksella 1,65a)
• Luotettava virtalähde (esim. Akku tai säännelty tasavirtalähde)
• Hyppääjäjohdot
• Tietokoneeseen asennettu Arduino IDE
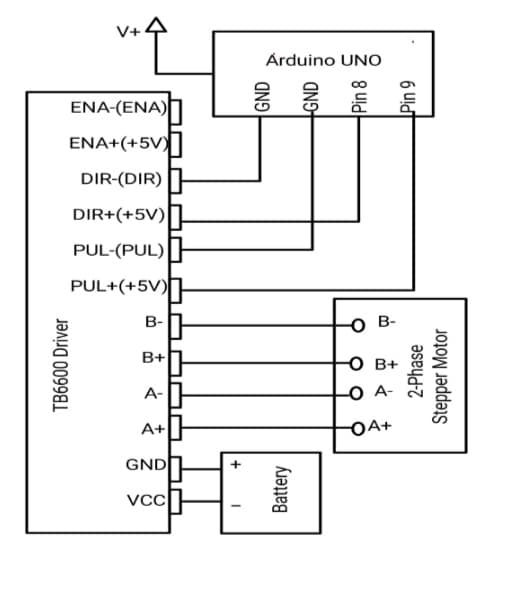
Integroidaksesi TB6600 Arduinon kanssa noudattaen näitä yksityiskohtaisia ohjeita
Kytke suunnan ja pulssisignaalit
• Yhdistä DIR+ ja Pul+ -liittimet TB6600: lla Arduino -nastaihin 8 ja 9, vastaavasti.Nämä tappit lähettävät suunnan ja pulssisignaalit.
• Kiinnitä Arduinon maa- ja pul- liittimet (GND) -tappi.
• Kytke moottori TB6600: een: Kiinnitä askelmoottorin johdot TB6600 -liittimiin.
• A+ ja A- yhdelle moottorin kelalle.
• B+ ja B- toiselle kelalle.
• Virta TB6600 -ohjain: Kytke TB6600: n VCC- ja GND -nastat virtalähteeseen.Varmista, että jännite vastaa moottorin ja kuljettajan vaatimuksia vaurioiden välttämiseksi.
Mikrotep -resoluution säätäminen
TB6600 antaa sinun hienosäätää askelmoottorin liikkeen tarkkuutta SW1- ja SW2-kytkimillä.Säädä nämä kytkimet seuraavasti:
• ¼ Vaiheen resoluutio: Aseta SW1 päälle ja SW2 pois päältä.
• ⅛ Vaiheen resoluutio: Aseta SW1 pois ja SW2 päälle.
• 1/32 Vaiheen resoluutio: Aseta sekä SW1 että SW2 pois päältä.
• Täysivaiheinen tila: Aseta sekä SW1 että SW2 päälle.
Totuuspöytä
|
SW2 |
Mikroteppiresoluutio |
|
POIS |
1/32 askel |
|
-Lla |
1/8 askel |
|
POIS |
1/4 askel |
|
-Lla |
Täysi askel |
Kytkimen säätöjen avulla voit optimoida tarkkuuden ja nopeuden välisen tasapainon projektin tarpeiden perusteella.
Varmistaaksesi, että moottorisi toimii turvallisten virran rajojen sisällä, TB6600 sisältää lisäkytkimiä (SW4 ja SW6) virran virtauksen säätämiseksi.Nämä asetukset ovat hyödyllisiä:
• Ylikuormitusvaurioiden estäminen.
• Ylläpitää johdonmukaista moottorin suorituskykyä.
• Varmista aina, että moottorin virta pysyy kuljettajan enintään 4a: n alapuolella molempien komponenttien suojaamiseksi.
• Ohjaa moottorin suunta: Jos haluat moottorin kiertävän vastapäivään, muokkaa Arduino -koodin DIR+ -tapin tilaa.
• Testaus ja vianetsintä: Asetuksen suorittamisen jälkeen lataa askelmoottorin perusohjausluonnos varmistaaksesi johdotuksen ja ohjaimen toiminnallisuuden.
• Vältä ylikuumenemista: Varmista TB6600-ohjaimen asianmukainen ilmanvaihto, etenkin korkean virran sovelluksissa.
Sovellukset
TB6600 -moduulilla on aktiivinen rooli monilla aloilla, joissa käytetään huolellista moottorin ohjausta.Sen sopeutumiskyky paistaa erilaisissa toteutuksissa, jotka korostavat sen ainutlaatuisia ominaisuuksia:
Antennin sijainti
Televiestinnän alalla optimaalisen antennin kohdistamisen saavuttaminen on pakollista laadun signaalin vastaanottamiselle ja lähettämiselle.TB6600 helpottaa tarkkuusliikettä parantaen siten viestintäjärjestelmien tehokkuutta.
Askelmoottorin hallinta
Automaatiossa ja robotiikassa tarkka askelmoottorin käsittely saavutetaan TB6600: n kautta, jolloin voit tarkentaa liikkeen tarkkuutta ja vahvistaa järjestelmän luotettavuutta.
CNC -operaatiot
Tietokoneen numeerisen ohjauksen (CNC) koneiden kohdalla TB6600 parantaa monimutkaisia leikkaus- ja jauhatusprosesseja, jolloin voit ylläpitää suurta tarkkuutta ja toistettavaa tarkkuutta heidän työssään.
3D -tulostustarkkuus
Lisäainevalmistuksessa, erityisesti 3D -tulostuksessa, TB6600 tarjoaa yksityiskohtaisen moottorin ohjauksen, joka tukee monimutkaisten muotojen ja -muotojen käsityössä tarvittavien tulostuspäiden tarkkaa sijoittamista.
Monimutkainen moottorin ohjaus
Moduuli on arvokas monimutkaisille motoristen ohjaustehtäville monimutkaisissa automaatiojärjestelmissä, mikä parantaa tehokkuutta ja mahdollistaa puhdistetun hallinnan.
Nopeuden, sijainnin ja kiertohallinnan hallinta
TB6600 on erinomainen skenaarioissa, jotka vaativat tarkkaa nopeutta ja kiertohallintaa, jota käytetään enimmäkseen suorituskyvyn optimointiin jatkuvasti muuttuvissa ympäristöissä.
Kuvantamislaitteet ja pankkijärjestelmät
Moduuli tukee kameroiden ja pankkiautomaattien luotettavaa toimintaa varmistamalla sileät, tarkat moottoriliikkeet, jotka pidentävät laitteiden käyttöaikaa.
Kaiverruslaitteiden tarkkuus
Kaiverrustyökaluissa ja koneissa TB6600 tarjoaa tarkan hallinnan, joka on tarpeen hienoksi yksityiskohtaisten mallien suorittamiseen, vaarallinen tekijä teollisuudessa, jolla tarkkuus ja yksityiskohdat ovat hallitsevia.
Meistä
ALLELCO LIMITED
Lue lisää
Nopea kysely
Lähetä kysely, vastaamme heti.
Usein Kysytyt Kysymykset [FAQ]
1. Mitä virtalähdettä minun pitäisi käyttää TB6600 -ohjaimeen?
TB6600 -askelmoottorin ohjain toimii virtalähteen jänniteellä välillä 8 V - 45 V.
2. Kuinka voin hallita askelmoottorin nopeutta TB6600: n kanssa?
TB6600 käyttää pulssin leveyden modulaatiota (PWM) moottorin nopeuden säätämiseen.Voit muuttaa nopeutta muokkaamalla PWM -taajuutta.
3. Voiko TB6600-tukeminen korkean virran askelmoottorit?
Kyllä, TB6600 pystyy käsittelemään jopa 4,5A: ta, joten se on yhteensopiva tämän virran luokiteltujen askelmoottorien kanssa.
4. Kuinka voin kääntää moottorin suunnan TB6600: n avulla?
Kääntämällä moottorin suunnan kääntämällä tulosignaalisekvenssi ohjaustapissa (esim. IN1-IN2-in3-in4 eteenpäin, IN4-In2-in2-in1 käänteisesti).
5. Voinko kytkeä askelmoottorin, jolla on yli 4 johtoa TB6600: een?
TB6600 on valmistettu 4-johtimolle askelmoottoreille.Jos moottorillasi on yli 4 johtoa, tarvitset toisen ohjaimen.
6. Onko TB6600 -yhteensopiva NEMA23 -askelmoottorin kanssa?
TB6600 toimii hyvin NEMA17 -moottorien kanssa, mutta ei yleensä sovellu NEMA23 -moottoreille niiden suurempien nykyisten vaatimusten vuoksi.

Täydellinen opas E18-D80NK Säädettävään IR-anturiin
12.12.2024

DS3231 RTC -moduuli Selitettiin: PIN -kaavio, tekniset tiedot ja mikrokontrollerin rajapinta
12.12.2024
Suositut viestit
-

COMPLECT -ohjeet Tietokoneet: Kuinka ne muuttivat tietojenkäsittelyä?
18.04.8000 147757
-

USB-C-pinout ja ominaisuudet
18.04.2000 111935
-
Xilinx Unified Simulation Primitive -sovelluksen käyttäminen: Kattava opas FPGA: n suunnitteluun ja simulointiin
18.04.1600 111349
-

Virtalähteen jännitteet elektroniikassa: VCC:n, VDD:n, VEE:n, VSS:n ja GND:n merkitys
18.04.0400 83719
-

RJ45 Connector Guide: Pinout, johdotus, kaapelityypit ja käyttö
01.01.1970 79508
-

Lopullinen opas johdon värikoodiin nykyaikaisissa sähköjärjestelmissä
Tapa, jolla sähköjärjestelmämme käyttävät värejä, ei ole vain ulkonäölle.Jokainen lankaväri osoittaa nyt tietyn toiminnon, mikä helpottaa sähkökomponenttien tunnistamista ja käsittelyä oikein asenn...01.01.1970 66901
-

Puhdistusventtiilin opas: Toiminta, oireet, testaus ja korvaava moottorin optimaalinen suorituskyky
Puhdistusventtiili on keskeinen osa auton järjestelmää, joka auttaa pitämään ilman puhtaana hallitsemalla polttoainehöyryjä ennen kuin ne voivat paeta ilmakehään.Tämä ei vain auta ympäristöä vähent...01.01.1970 63019
-

Laatu (Q) tekijä: Yhtälöt ja sovellukset
Laatukerroin tai 'Q' on tärkeä tarkistettaessa, kuinka hyvin induktorit ja resonaattorit toimivat elektronisissa järjestelmissä, jotka käyttävät radiotaajuuksia (RF).'Q' mittaa kuinka hyvin piiri m...01.01.1970 63010
-

Huippututkinnon saavuttaminen suurimmalla tehonsiirtolauseella
Suurin virransiirtolause selittää, kuinka energia lähteestä, kuten akku tai generaattori, virtaa kytkettyyn kuormaan.Se näyttää tarkan tilan, jossa kuorma vastaanottaa eniten virtaa.Tämä artikkeli ...01.01.1970 54081
-

A23 -akun tekniset tiedot ja yhteensopivuus
A23-akku on pieni, sylinterimainen akku, jolla on korkea jännite.Kutsutaan myös 23a, 23ae tai MN21, se toimii 12 voltilla ja paljon korkeampi kuin AA- tai AAA -akut.Sen erityinen muotoilu ...01.01.1970 52121
Kuuma osanumero
-
LCMXO2280C-5FTN324C
Lattice Semiconductor Corporation
IC FPGA 271 I/O 324FTBGA
KBP202G
Diodes Incorporated
BRIDGE RECT 1PHASE 200V 2A KBP
C5750X5R2A475K230KA
TDK Corporation
CAP CER 4.7UF 100V X5R 2220
GRM2165C1H472JA01D
Murata Electronics
CAP CER 4700PF 50V C0G/NP0 0805
LTC3835EFE#PBF
Analog Devices Inc.
IC REG CTRLR BUCK 20TSSOP
CPC1943GS
IXYS Integrated Circuits Division
SSR RELAY SPST-NO 500MA 0-400V
MPC5121YVY400B
NXP USA Inc.
IC MCU 32BIT ROMLESS 516FPBGA
1N5399
NTE Electronics, Inc
DIODE GEN PURP 1KV 1.5A DO15
1210GA470KAT1A
KYOCERA AVX
CAP CER 47PF 2KV NP0 1210
IR3507MTRPBF
Infineon Technologies
IC XPHASE3 CONTROL 20-MLPQ
M27C2001-10B1
STMicroelectronics
IC EPROM 2MBIT PARALLEL 32DIP
1N3288
Microchip Technology
STANDARD RECTIFIER
SI4942DY-T1-E3
Vishay Siliconix
MOSFET 2N-CH 40V 5.3A 8-SOIC
FQB6N80TM
onsemi
MOSFET N-CH 800V 5.8A D2PAK
NB7L14MMNG
onsemi
IC CLK BUFFER 1:4 8GHZ 16QFN
GRM0336R1E8R8DD01D
Murata Electronics
CAP CER 8.8PF 25V R2H 0201
SP6205ER-L-2-5
MaxLinear, Inc.
IC REG LINEAR 2.5V 500MA 8DFN
ISL28196FHZ-T7
Renesas Electronics America Inc
IC COMPARATOR 1 GEN PUR 6SOT -

LMX2571NJKT
Texas Instruments
IC FREQ SYNTH 36WQFN
ADAS1000-2BSTZ-RL
Analog Devices Inc.
IC AFE 5 CHAN 19BIT 64LQFP
FH41-50S-0.5SH(05)
Hirose Electric Co Ltd
CONN FFC BOTTOM 50POS 0.5MM R/A
RN242CST2RA
Rohm Semiconductor
RF DIODE PIN 30V VMN2
C1608X7R1E105K080AB
TDK Corporation
CAP CER 1UF 25V X7R 0603
VI-25L-MV
Vicor Corporation
DC DC CONVERTER 28V 150W
ATMEGA328-PU
Microchip Technology
IC MCU 8BIT 32KB FLASH 28DIP
FCP165N65S3R0
onsemi
MOSFET N-CH 650V 19A TO220-3
STPS3L60RL
STMicroelectronics
DIODE SCHOTTKY 60V 3A DO201AD
NDS336P
onsemi
MOSFET P-CH 20V 1.2A SUPERSOT3
BCM5482SA1KFBG
Broadcom Limited
DUAL PORT 10/100/1000BASE-T PH
AUIRFS8407TRL
Infineon Technologies
MOSFET N-CH 40V 195A D2PAK
CL31B474KAFNNNE
Samsung Electro-Mechanics
CAP CER 0.47UF 25V X7R 1206
LM2588SX-12
Texas Instruments
IC REG MULT CONFG 12V 5A TO263-7
W83775G
Nuvoton Technology Corporation
SENSOR DIGITAL -40C-125C 10TSSOP
LTC6244HVIMS8#TRPBF
Analog Devices Inc.
IC CMOS 2 CIRCUIT 8MSOP
78119-1258
Molex
0.5 FPC CONN. VERTICAL SMT NON-Z
MC10H124MEL
onsemi
IC TRANSLATOR UNIDIR 16SOEIAJ -

VI-J14-CZ
Vicor Corporation
DC DC CONVERTER 48V 25W
SIZ910DT-T1-GE3
Vishay Siliconix
MOSFET 2N-CH 30V 40A POWERPAIR
EPF10K30EFC256-1
Altera
IC FPGA 176 I/O 256FBGA
SN74HC373AN
Texas Instruments
IC DTYPE LATCH OCTAL 20DIP
FT24C02A-KTR-T
Fremont Micro Devices Ltd
IC EEPROM 2KBIT I2C 1MHZ 8TSSOP
175975-2
TE Connectivity AMP Connectors
CONN HEADER R/A 20POS 2.5MM
FAN7554
onsemi
IC REG CTLR FLYBK/FWRD CONV 8DIP
UCV1E102MNL1GS
Nichicon
CAP ALUM 1000UF 20% 25V SMD
006208520310000/+
KYOCERA AVX
CONN FFC FPC VERT 20POS 1MM SMD
55932-0730
Molex
2.0 WTB PLG HSG ASSY STR W/O BOS
FDB33N25TM
Fairchild Semiconductor
POWER FIELD-EFFECT TRANSISTOR, 3
B0530WS-7-F
Diodes Incorporated
DIODE SCHOTTKY 30V 500MA SOD323
M27C256B-90C1
STMicroelectronics
IC EPROM 256KBIT PARALLEL 32PLCC
XC4085XLA-09BG432C
AMD
FPGA, 3136 CLBS, 55000 GATES
UCD3020ARGZR
Texas Instruments
IC DGTL PWR CTRLR 48VQFN
TPS74401RGWR
Texas Instruments
IC REG LINEAR POS ADJ 3A 20VQFN
CL21B222KBANNNC
Samsung Electro-Mechanics
CAP CER 2200PF 50V X7R 0805
THS4061IDRG4
Texas Instruments
IC VOLTAGE FEEDBACK 1 CIRC 8SOIC