Opas moottorin nopeuden hallintaan: AC- ja DC -tekniikat, menetelmät ja sovellukset
Tämä opas on kyse siitä, kuinka hallitsemme sähkömoottorien nopeutta.Se selittää, kuinka sekä AC (vuorotteleva virta) että DC (tasavirta) moottorit voidaan tehdä nopeammin tai hitaammin koneen tarvitsemasta riippuen.Se puhuu työkaluista, kuten VFD: t (muuttuvan taajuusasemat) vaihtovirtamoottoreista ja PWM: lle (pulssin leveysmodulaatio) DC -moottoreille.Opit myös kuinka moottorin eri osat, kuten staattori ja roottori, voidaan säätää nopeuden muuttamiseksi.Opas jakaa vanhemmissa järjestelmissä ja nykyaikaisessa tekniikassa käytetyt erilaiset menetelmät, ja se osoittaa, missä näitä moottoreita käytetään elämässämme.Luettelo
Mikä on moottorin nopeuden hallinta?
Moottorin nopeuden hallinta Tarkoittaa, kuinka nopeasti moottori pyörii vastaamaan tehtävän tarkkoja tarpeita.Kyse ei ole vain nopeuden muuttamisesta satunnaisesti, vaan moottorin käyttäytymisen sovittamisesta siihen, mitä järjestelmä vaatii milloin tahansa.Tämä kyky hienosäätää nopeutta parantaa energiatehokkuutta, pidentää laitteiden käyttöikää vähentämällä mekaanista jännitystä ja varmistaa toiminnan paremman tarkkuuden.Esimerkiksi kuljettimen on ehkä hidastettava herkkiä esineitä tai nopeuttamaan, kun linja on selkeä.Sähkömoottorien on usein mukauduttava muuttuviin kuormiin, tehtäviin tai ympäristöihin.Ilman säädettävää nopeutta moottorit toimisivat vain yhdellä kiinteällä nopeudella, mikä tekee niistä vähemmän hyödyllisiä ja vähemmän tehokkaita.
Nopeutta ohjataan säätämällä sähkötuloa.AC -moottoreissa tämä tarkoittaa yleensä virtalähteen taajuuden muuttamista.DC -moottoreissa jännitemuutokset ovat yleisempiä.Jotkut järjestelmät käyttävät myös palauteaineita suorituskyvyn seuraamiseen ja säätöjen tekemiseen.Tämä palautesilmukka auttaa ylläpitämään jatkuvaa nopeutta myös silloin, kun kuormat vaihtelevat.Nopeudenhallinta vaihtelee vanhempien järjestelmien perusvastuksista edistyneisiin digitaalisiin ohjaimiin käyttämällä mikroprosessoreita ja hienostuneita algoritmeja.Näiden uudempien menetelmien avulla moottorit voivat reagoida sujuvasti ja tarkasti muuttuviin olosuhteisiin.
AC Motor Speed -ohjaus
AC -moottorin nopeus riippuu kahdesta asiasta: vaihtovirtavoiman taajuus ja moottorin napojen lukumäärä.Nopeuden muuttamiseksi muutamme taajuutta.Siellä muuttuvataajuusasemat (VFD) tulevat sisään. VFD muuntaa kiinteätaajuisen vaihtovirtavirran tasavirtaan, tasoittaa sen ja muuntaa sen sitten takaisin AC: ksi halutulla taajuudella.Tämän avulla moottorin nopeus säädetään tarkasti.Hallitsemalla sekä taajuutta että jännitettä VFD: t voivat hallita moottorin vääntömomenttia ja nopeutta tehokkaammin.
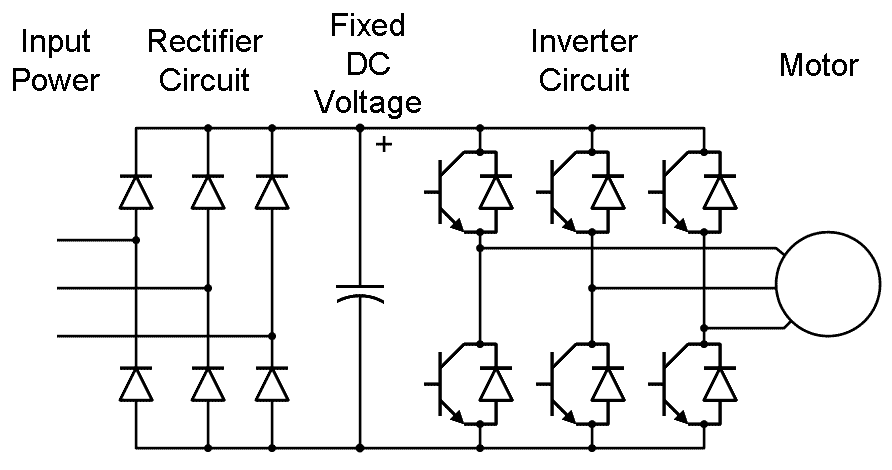
Kuva 2. AC -moottorin nopeuden ohjausjärjestelmän lohkokaavio
Nykyaikaisen muuttuvan taajuusasemat (VFD) ylittävät vain moottorin nopeuden säätämisen sisällyttämällä edistyneitä ohjaustekniikoita, kuten vektoriohjauksen, joka erottaa vääntömomentin ja vuon hienosäädetyn suorituskyvyn ja suoran vääntömomentin ohjauksen (DTC), joka tarjoaa nopeita ja tarkkoja vääntömomentin säätöjä.Nämä ominaisuudet antavat moottoreille mahdollisuuden nopeuttaa, hidastaa ja ylläpitää kuormia tehokkaasti ilman lisämekaanisia komponentteja tai lisättyjä jännityksiä.Ominaisuudet, kuten pehmeän käynnistystoiminnot, sisäänrakennettu ylikuormitussuojaus ja edistyksellinen diagnostiikka ovat tehneet VFD: t tärkeinä monissa sovelluksissa, vedenkäsittelylaitoksista hissijärjestelmiin.
DC -moottorin nopeuden ohjaus
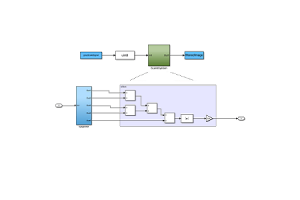
DC -moottorit valitaan usein, kun nopea, tarkka nopeusmuutokset ovat välttämättömiä.Niiden nopeus muuttuu suoraan ankkuriin kohdistuvan jännitteen kanssa.Kuorma vaikuttaa myös nopeuteen, lisääntynyt kuorma hidastaa moottoria tyypillisesti.Tehokkain menetelmä on tänään PWM.Se käyttää korkeataajuista jännitepulsseja säädettävällä leveydellä moottorin toimitetun keskimääräisen jännitteen ohjaamiseksi.Tämä mahdollistaa tarkan nopeudenhallinnan pienellä virran menetyksellä.
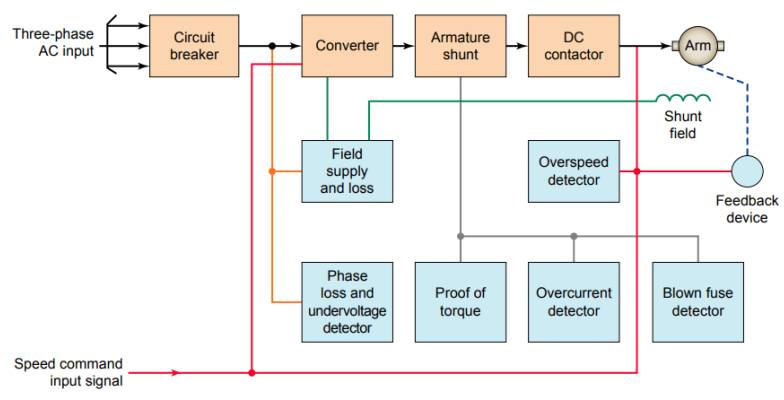
Kuva 3. Lohkokaavio DC -moottorin nopeuden ohjausjärjestelmästä
Muita ohjausmenetelmiä ovat kenttäohjaus, jossa virran säätäminen magneettikentässä muuttaa moottorin nopeutta, kentän vähentäminen lisää nopeutta, mutta vähentää vääntömomenttia;Ankkuriresistenssin hallinta, yksinkertainen, mutta tehoton menetelmä, joka lisää vastusjännitteen ja nopeuden vähentämiseksi;ja suljetun silmukan ohjaus, joka käyttää antureita nopeuden tarkkailuun ja jännitteen tai virran säätämiseen jatkuvasti suorituskyvyn ylläpitämiseksi vaihtelevien kuormitusten alla.Korkean tarkkuuden ja reagointikyvyn vuoksi DC-moottoreita käytetään yleisesti robottiikoilla, lääketieteellisissä laitteissa ja akkukäyttöisissä työkaluissa.
Yksityiskohtaiset tekniikat: AC vs. DC
AC Motorin nopeudenhallintatekniikat
AC -moottorin nopeudenhallintatekniikat perustuvat synkronisen nopeuden kaavaan:
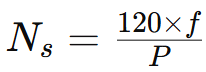
Jossa:
• NS on synkroninen nopeus (RPM)
• F on vaihtovirtasyötön taajuus (Hz: ssä)
• P on moottorin pylväiden lukumäärä
Vaihtelemalla syöttötaajuutta moottorin nopeutta voidaan säätää, mikä saavutetaan käyttämällä muuttuvan taajuusasemia (VFD).VFD-ohjaustyyppiä on kahta päätyyppiä: skalaarinen (V/F) ohjaus, joka ylläpitää vakiojännite- ja taajuussuhdetta ja on yksinkertainen ja vakaa perussovelluksissa;ja vektoriohjaus, joka erottaa vääntömomentin ja magneettisen flux -komponentit tarkemman ja reagoivan hallinnan mahdollistamiseksi, etenkin alhaisella nopeudella.Edistyneempiin järjestelmiin sisältyy anturiton ohjaus, arvioimalla moottorin sijainti ilman fyysisten anturien tarvetta.Lisäksi VFD: t tukevat toimintoja, kuten hallittu kiihtyvyys (ramppi), vääntömomentin rajoittaminen ja jarrutus, mikä tekee niistä erittäin sopivia vaativiin sovelluksiin, kuten hisseihin, nosturiin ja CNC -koneisiin.
DC -moottorin nopeudenhallintatekniikat
DC -moottorin nopeutta säätelee suhde,
Jossa:
• V on ankkurijännite
• IA on ankkurivirta
• RA on ankkuriresistenssi
• φ on magneettinen flux
Eri nopeudenhallintatekniikoiden joukossa pulssin leveyden modulaatio (PWM) on edelleen tehokkain sen tehokkuuden ja reaktiivisuuden vuoksi.Muita menetelmiä ovat vuon heikentyminen, mikä lisää nopeutta vähentämällä magneettikentän voimakkuutta, joka sopii tilanteisiin, joissa alempi vääntömomentti on hyväksyttävää;Ankkuriresistenssin hallinta, joka on yksinkertaisempi, mutta vähemmän tehokas energiahäviöiden vuoksi;ja suljetun silmukan hallinta palautteella, joka käyttää antureita, kuten koodereita tai tachogeneraattoreita tarkan ja mukautuvan nopeuden säätelyn aikaansaamiseksi.
AC -moottorin nopeudenhallintamenetelmät
Staattorin sivunohjaus
Jännitteenohjaus: Tämä menetelmä hidastaa moottoria vähentämällä staattorin käämissä käytettyä syöttöjännitettä.Jännitteen putoamalla magneettikentän lujuus vähenee, mikä johtaa alhaisempaan vääntömomenttiin ja nopeuteen.Vaikka tämän menetelmän yksinkertaisuus tekee siitä houkuttelevan perussovelluksissa, etenkin tuulettimen tai pumpun kuormituksissa, se on yleensä tehoton, koska moottori piirtää edelleen suurta virtaa jopa pienentyneellä nopeudella, mikä johtaa lisääntyneisiin lämpö- ja energiahäviöihin.Se on varattu kevyille toimille, joissa tarkkaa ohjausta ei vaadita.
Taajuuden hallinta (VFDS): Muuttuvan taajuusasemat (VFD) Säädä sekä moottorille toimitettu jännite että taajuus, mikä mahdollistaa nopeuden ja vääntömomentin tarkan ja tehokkaan hallinnan.Ylläpitämällä vakio volttia-nertsasuhde VFD: t säilyttävät moottorin magneettisen tasapainon ja vääntömomentin ominaisuudet laajalla nopeusalueella.Tätä menetelmää käytetään laajasti nykyaikaisissa teollisuus- ja kaupallisissa sovelluksissa sen energiatehokkuuden, sopeutumiskyvyn ja kyvyn käsittelemisen vuoksi vaihtelevien kuormitusolosuhteiden vuoksi.
Pylväsvaihto: Jotkut oravan häkin induktiomoottorit on suunniteltu staattori käämillä, jotka voidaan konfiguroida uudelleen magneettisten napojen määrän muuttamiseksi.Muutamalla napamäärää, moottorin synkroninen nopeus muuttuu erillisissä vaiheissa (esim. 2-napaisesta 4-napaiseen toimintaan), jolloin moottori voi toimia eri kiinteillä nopeuksilla.Tämä menetelmä tarjoaa yksinkertaisen ja vankan tavan saavuttaa monenopeuksinen ohjaus ilman ulkoista elektroniikkaa, vaikka se rajoittuu ennalta määritettyihin nopeusasetuksiin ja puuttuu sujuva vaihtelu.
Roottorin sivunohjaus
Ulkoinen roottorin vastus : Tämä tekniikka sisältää muuttuvien vastusten lisäämisen roottoripiiriin liukurenkaiden ja harjojen kautta.Lisäämällä roottorinkestävyyttä, liukastumista lisääntyy, mikä alentaa roottorin nopeutta ja tarjoaa paremman vääntömomentin hallinnan, hyödyllisen käynnistyksen aikana tai kuormille, jotka vaativat muuttuvan vääntömomentin.Sähköenergian osa kuitenkin häviää lämmönä ulkoisissa vastuksissa, mikä tekee menetelmästä tehottoman jatkuvaan käyttöön.
Kaskadinhallinta: Tässä asennuksessa kaksi moottoria on mekaanisesti kytketty, ja yksi moottori (toissijainen tai apumoottori) on kytketty sähköisesti päämoottorin roottoripiiriin.Tämä järjestely sallii virranjaon ja nopeuden hallinnan kiinteissä vaiheissa riippuen sähkö- ja mekaanisen linkin suunnittelusta.Vaikka Cascade Control oli suhteellisen monimutkainen ja vähemmän yleinen nykyaikaisissa järjestelmissä, se oli tehokas tapa hallita suuria kuormia ja keskitason nopeuksia vanhoissa teollisuuskoneissa.
EMF -injektio: Electromotive Force (EMF) -injektio, jota käytetään Kramerin ja Scherbius -asemien kaltaisissa järjestelmissä, sisältää spesifisen taajuuden ja vaiheen ohjatun jännitteen injektoinnin roottorin piiriin.Tämä muuttaa roottorin liukutaajuutta ja mahdollistaa muuttuvan nopeuden toiminnan paremmalla tehokkuudella kuin vastusmenetelmät.Nämä asemat soveltuvat hyvin suuritehoisiin sovelluksiin, joissa tarkka nopeuden säätely ja energian talteenotto ovat tärkeitä, kuten suurissa kompressoreissa, pumppuissa tai myllyissä.
DC -moottorin nopeudenhallintamenetelmät
SHUNT -moottorin ohjaus
Kenttäohjaus: Tämä menetelmä käsittää muuttuvan vastuksen asettamisen sarjaan DC -shunttimoottorin kenttäkävelillä.Lisäämällä vastus, kentän käämin läpi kulkeva virta vähenee, mikä heikentää magneettista vuotoa.DC -moottorin nopeusyhtälön mukaan vuon väheneminen johtaa nopeuden lisääntymiseen olettaen, että ankkurijännite oletetaan.Kenttäohjaus on suhteellisen tehokas nopeuden lisäämiseksi nimellisarvon yläpuolelle.Koska kentän heikkeneminen vähentää myös vääntömomenttia ja voi aiheuttaa epävakautta tai ylinopeutta, tätä menetelmää on sovellettava huolellisesti ja vaatii usein suojatoimenpiteitä.
Ankkurijännitteen hallinta: Tässä menetelmässä ankkuriin toimitettu jännite vaihtelee suoraan pitäen kenttävirta vakiona.Ankkurijännitteen laskeminen vähentää nopeutta ja vääntömomenttia suhteellisesti.Tämä tekniikka on suoraviivainen toteuttaa ja sallii sujuvan hallinnan nimellisnopeuden alapuolella.Se on kuitenkin vähemmän energiatehokas, etenkin kuorman alla, koska mikä tahansa ylimääräinen energia häviää usein lämmönä kontrollivastuksissa tai tehoelektroniikassa.
Ward-Leonard-järjestelmä: Tämä klassinen ohjausjärjestelmä käyttää moottorigeneraattorin (M-G) -sarjaa, jossa tuotetaan muuttuvaa jännitettä säätämällä AC- tai DC-moottorin ohjaaman tasavirtageneraattorin lähtö.Syntynyt jännite syötetään shunt -moottorin ankkuriin, mikä mahdollistaa hienon ja jatkuvan ohjauksen laajan nopeuden alueella molemmissa suunnissa.Vaikka Ward-Leonard-järjestelmä on kallista ja tilaa vievää, se tarjoaa erinomaisen suorituskyvyn vääntömomentinhallinnan ja nopeuden säätelyn suhteen, mikä tekee siitä ihanteellisen vaatimaan sovelluksia, kuten hissinostot, valssausmyllyt ja tulostuspuristimet.
Sarjan moottorin ohjaus
Kenttäsuuntaja: Vastus (sukeltaja) on kytketty samanaikaisesti sarjan kenttäkävelyn kanssa.Tämän ansiosta osa virrasta voi ohittaa kentän käämin, heikentää magneettista vuotoa ja lisätä moottorin nopeutta.Tämä menetelmä tarjoaa nopeudenhallinnan perusmuodon ja hyödyllistä sovelluksissa, kuten pito, jossa vaaditaan väliaikaisen nopeuden lisäykset.Se vähentää kuitenkin vääntömomenttia, ja sen on oltava tasapainossa varovasti epävakauden tai moottorin ylikuumenemisen estämiseksi.
Ankkuri : Asettamalla vastus ankkuripiirin rinnakkain, ankkurin ja kentän välistä virranjakaumaa voidaan muokata.Tämä säätö muuttaa moottorin vääntömomentin nopeuden ominaispiirteitä.Se on vivahteikkaampi menetelmä kuin kenttäsuontimet, jotka sallii vääntömomentin paremman hallinnan, mutta se tuo monimutkaisuutta ja vaatii huolellista virittämistä suorituskyvyn menetysten tai vaurioiden välttämiseksi.
Napautettu kenttä ja uudelleenryhmä: Tämä menetelmä muuttaa magneettikentän voimakkuutta muuttamalla kenttäkävelissä olevien aktiivisten käännösten lukumäärää.Käyttämällä nauhoja tai uudelleenyhteyksiä (ryhmittely uudelleen) uudelleen, voidaan valita erilaiset magneettiset kokoonpanot nopeusketorin käyrän siirtämiseksi.Se tarjoaa kiinteän nopeuden vaiheet ja sitä käytetään yleisesti laitteissa, joissa nopeuden ennustettavissa olevat muutokset ovat riittäviä, kuten nosturit tai nostimet.
Resistiivinen hallinta: Perusmenetelmä, jossa ulkoiset vastukset lisätään sarjaan moottorin kanssa pudottaaksesi jännitettä ja vähentää nopeutta.Vaikka tämä menetelmä on yksinkertainen ja edullinen, se on erittäin tehoton, koska suuri osa sähköenergiasta menetetään lämmönä.Sitä käytetään yleensä vain edullisissa tai vanhemmissa järjestelmissä, joissa tehokkuus ei ole ensisijainen huolenaihe.
Sarjan selkäranka: Tässä tekniikassa kaksi tai useampia sarjamoottoreita on kytketty joko sarjaan tai rinnakkain.Sarjassa heillä on sama virta ja ne toimivat pienemmällä nopeudella suuremmalla vääntömomentilla;Samanaikaisesti ne toimivat suuremmalla nopeudella vähentyneellä vääntömomentilla.Tämä ohjausmenetelmä mahdollistaa nopeuden vaihemuutokset ja sitä löytyy yleisesti sähköisten vetojärjestelmien, kuten raitiovaunujen ja junien, joissa tarvitaan yksinkertaista ja luotettavaa nopeuden hallintaa.
Sovellukset
AC Motor Speed -ohjaussovellukset
Teollisuus
Teollisuusasetuksissa AC -moottorin nopeudenhallinta on rooli optimoimalla kuljettimia, sekoittimia, pumppuja ja muita mekaanisia järjestelmiä.Säädintä tarkasti moottorin nopeutta käyttämällä laitteita, kuten muuttuvan taajuusasemia (VFD), toiminnot voidaan virittää tietyille tuotantovaatimuksille, mikä johtaa parannettuun prosessin tarkkuuteen, vähentyneeseen mekaaniseen jännitykseen ja energiansäästöihin.Esimerkiksi kuljetinhihnan hidastaminen tuotteen tarkistuksen aikana tai sekoittimen varovasti nouseminen vähentää kulumista ja parantaa turvallisuutta.Tämä joustavuus parantaa yleistä tehokkuutta ja pidentää koneiden käyttöikää.
LVI
Lämmitys-, tuuletus- ja ilmastointijärjestelmät (LVI) hyötyvät suuresti nopeusohjattujen moottoreista puhaltimissa, puhaltimissa ja kompressoreissa.Säätämällä moottorin nopeutta vasteena ympäristöolosuhteisiin ja järjestelmän vaatimuksiin energiankulutus vähenee, etenkin muuttuvassa kuormitustilanteessa, kuten lämpötilan vaihtelut tai käyttöasteen muutokset.VFD: t mahdollistavat ilmavirran ja jäähdytyssyklien pehmeän käynnistyksen ja hienosäätetyn modulaation, mikä johtaa hiljaisempaan toimintaan, parannetulle mukavuudelle ja alhaisemmille toimintakustannuksille sekä asuin- että kaupallisissa rakennuksissa.
Kodin laite
Nykyaikaiset kodinkoneet, kuten pesukoneet, jääkaapit ja astianpesukoneet, käyttävät yhä enemmän nopeusohjattuja vaihtovirtamoottoreita suorituskyvyn ja energiatehokkuuden parantamiseksi.Esimerkiksi muuttuvan nopeuden moottorit pesukoneissa mahdollistavat erilaiset pesisyklit optimoidulla sekoittamisella ja spin-nopeudella, vähentäen melua ja tärinää.Jääkaapissa nopeudenhallintakompressorit voivat säätää jäähdytysjaksoja sujuvammin pitäen tasaiset lämpötilat, joissa on vähemmän energiankäyttöä.
Älykäs infrastruktuuri
Älykkäissä rakennuksissa ja kuljetusjärjestelmissä vaihtovirtamoottorin nopeuden hallinta on olennainen osa hissien, liukuportaiden, liikkuvien kävelytien ja automatisoitujen ovien hallintaa.Nämä järjestelmät käyttävät usein älykkäitä motorisia ohjaimia, jotka liittyvät rakennuksen hallintajärjestelmiin (BMS) tai IoT -verkkoihin hallinnan, diagnostiikan ja energian seurannan tarjoamiseksi.Esimerkiksi hissit voivat säätää kiihtyvyys- ja hidastuvuusprofiileja, jotka perustuvat matkustajakuormitukseen tai lattian kysyntään, mikä parantaa ajon mukavuutta ja energian käyttöä.Liukuportaat voivat hidastaa tai keskeyttää, kun niitä ei käytetä, vähentämällä tyhjäkäyntiä virrankulutusta ja yhdenmukaistaminen kestävän kehityksen tavoitteiden kanssa nykyaikaisessa infrastruktuurisuunnittelussa.
DC -moottorin nopeuden ohjaussovellukset
Robotti
DC -moottoreita käytetään laajasti robotiikassa johtuen niiden kyvystä tarjota nopea vaste ja tarkka nopeus ja sijainnin hallinta.Pulssin leveyden modulaation (PWM) ja palautejärjestelmien, kuten kooderien, avulla robottijärjestelmät voivat saavuttaa hienorakeisen liikkeen, joka tarvitaan tehtäviin, kuten objektin manipulointiin, navigointiin ja koordinointiin.Tämä reagointikyky on tärkeä sovelluksissa, jotka vaihtelevat teollisista robottivarrista autonomisiin mobiiliroboteihin.
Sähköajoneuvot
Sähköajoneuvoissa (EV) DC -moottorin nopeuden hallinta on hyvä sileälle kiihtyvyydelle, hidastuvuudelle ja yleisen ajomatkan suorituskyvylle.Säätämällä moottorille toimitettua jännitettä ja virtaa, ajoneuvot voivat siirtyä saumattomasti erilaisten nopeuksien ja vääntömomenttien välillä parantaen ajo -mukavuutta ja hallintaa.Regeneratiiviset jarrujärjestelmät käyttävät hallittua tasavirtamoottorin käyttöä muuntaaksesi kineettisen energian takaisin sähköenergiaksi jarrutuksen aikana, parantamalla kokonaistehokkuutta ja pidentämällä akun käyttöikää.Nämä ominaisuudet tekevät DC-moottoreista ihanteelliset sekä kaksipyöräiset että nelipyöräiset sähkökuljetusjärjestelmät.
Kuluttajalaitteet
DC -moottorit ovat monien kompaktien ja kannettavien kuluttajalaitteiden, mukaan lukien sähkötyökalut, hiustenkuivaajat, tietokoneen jäähdytystuulettimet ja pienet keittiölaitteet.Nopeuden hallinta näissä sovelluksissa varmistaa optimaalisen suorituskyvyn, turvallisuuden ja energiatehokkuuden.Esimerkiksi tehoharjoituksissa muuttuvan nopeuden liipaisimet mahdollistavat vääntömomentin ja nopeuden säätämisen eri materiaaleille, kun taas puhaltimissa nopeuden vaihtelu tarjoaa paremman mukavuuden ja melun hallinnan.Kompakti suunnittelu ja elektronisen ohjauksen helppous tekevät DC-moottorit, jotka sopivat akkukäyttöisiin laitteisiin.
Lääketieteelliset ja laboratoriolaitteet
Lääketieteelliset ja laboratorioinstrumentit vaativat erittäin hallittua, hiljaista ja luotettavaa moottorin käyttöä.Tarkka nopeudenhallinta -laitteiden DC -moottoreita käytetään laitteissa, kuten infuusiopumput, sentrifugit, kirurgiset työkalut ja automatisoidut analysaattorit.Nämä sovellukset vaativat hiljaista toimintaa arkaluontoisten ympäristöjen häiritsemiseksi sekä nesteiden, näytteiden tai kirurgisten liikkeiden tarkan toimittamisen tai mittauksen tarkan liikkeen hallinnan kanssa.Harjattomat tasavirtamoottorit (BLDC) suositaan alhaiseen meluun, pieneen kunnossapitoon ja tasaiseen suorituskykyyn.
Vertailutaulukko
|
Ominaisuus |
AC -moottori |
DC -moottori |
|
Virtalähde |
Käyttää vuorottelevaa virtaa (AC) |
Käyttää suoraa virtaa (DC) |
|
Kuinka nopeutta ohjataan |
Nopeus muuttuu säätämällä taajuutta muuttujaan
Taajuusasema (VFD) |
Nopeuden muutokset säätämällä jännite- tai kenttävirta |
|
Valvonta monimutkaisuus |
Monimutkaisempi: tarvitsee VFD: t, vektorin hallinta, joskus
anturit |
Yksinkertaisempi: Käyttää jännitemuutoksia, PWM: tä tai kenttäohjausta |
|
Reaktioaika |
VFD -viiveestä johtuva hitaampi vaste |
Nopea vastaus, etenkin digitaalisen ohjauksen kanssa |
|
Aloitusmomentti |
Matala ilman erityisiä ohjausmenetelmiä |
Korkea aloitusmomentti oletuksena |
|
Vääntömomentti eri nopeuksilla |
Vääntömomentti voi pudota alhaisella nopeudella |
Ylläpitää voimakasta vääntömomenttia kaikilla nopeuksilla |
|
Nopeuden vakaus |
Hyvä suljetun silmukan järjestelmien kanssa;Vähemmän vakaa ilman |
Erinomainen hallinta ja vakaus kaikilla nopeuksilla |
|
Nopeusalue |
Rajoittama käyttö- ja moottorisuunnittelu |
Laaja vaihtelu erittäin alhaisesta nopeuteen |
|
Ylläpitotarpeet |
Matala: Ei harjoja tai kommuttoreita |
Korkeampi: Harjat kuluvat, ellei harjaton |
|
Kestävyys ankarissa ympäristöissä |
Karkeampi ja parempi vaikeissa olosuhteissa |
Harjatut moottorit ovat vähemmän kestäviä karkeissa ympäristöissä |
|
Lämmönkäsittely |
Usein rakennettu jäähdytysjärjestelmillä |
Voi ylikuumentua, jos sitä ei jäähtyä oikein |
|
Melu ja häiriöt (EMI) |
Voi tuottaa sähkömelua (EMI);tarvitsee suodattamista |
Harjatut moottorit aiheuttavat melua;Harjaton ovat hiljaisempia |
|
Virtalähdetarpeet |
Toimii suoraan AC -verkkojen kanssa (esim. 120 V tai 240 V) |
Tarvitsee DC -tarjontaa tai muuntimen vaihtovirta |
|
Peruutussuunta |
Vaatii ohjelmointia VFD: ssä |
Helppo: Käännä vain napaisuus tai käytä H-siltaa |
|
Regeneratiivinen jarrutus |
Monimutkainen ja kallista asentaa |
Helppo ja tehokas, käytetään EV: ssä ja robotiikassa |
|
Energian talteenotto |
Mahdollinen edistyneillä VFD: llä |
Tukee luonnollisesti energian palautumista |
|
Digitaalisen ohjauksen integraatio |
Muodostaa yhteyden järjestelmiin, kuten PLC: t VFD: n läpi |
Mikrokontrollereilla on helppo ohjata |
|
Tehokkuus
|
Erittäin tehokas tasaisella nopeudella |
Erittäin tehokas muuttuvan nopeuden tai usein
alkaa/pysähtyy |
|
Ohjausjärjestelmän koko |
VFD: t voivat olla suuria ja tarvitsevat jäähdytystä |
DC -ohjaimet ovat pieniä ja helppo asentaa |
Johtopäätös
Moottorin nopeuden hallinta on erittäin tärkeää nykypäivän koneissa ja laitteissa.Se auttaa säästämään energiaa, saa koneet kestämään pidempään ja pitää ne sujuvasti.AC -moottorit käyttävät VFD: tä usein nopeuden muuttamiseen säätämällä tehon taajuutta.DC-moottorit muuttavat nopeutta säätämällä jännitettä tai käyttämällä nopeita on-off-signaaleja (PWM).Näiden menetelmien avulla koneet voivat tehdä työnsä paremmin, olipa kyse sitten suuresta tehdaskoneesta, ilmastointilaitteesta tai robottivarresta.AC-moottorit ovat erinomaisia raskaisiin töihin ja pitkäaikaiseen käyttöön, kun taas DC-moottorit ovat parempia, kun tarvitaan nopeaa ja tarkkaa liikettä.Käyttämällä oikeaa nopeuden hallintamenetelmää varmistamme, että koneet toimivat turvallisesti, tehokkaasti ja tarkalleen kuinka tarvitsemme niitä.
Meistä
ALLELCO LIMITED
Lue lisää
Nopea kysely
Lähetä kysely, vastaamme heti.
Usein Kysytyt Kysymykset [FAQ]
1. Mikä moottori on tehokkaampi, AC tai DC?
Teho riippuu enemmän moottorin suunnittelusta kuin tyyppi (AC tai DC).Saman koon ja jännitteen luokituksen kohdalla AC-moottorit ovat kuitenkin tehokkaampia, koska ne pystyvät käsittelemään suurempia kuormia ja rakennetaan jatkuvaa, raskasta käyttöä varten.Teolliset vaihtovirtamoottorit, kuten kolmivaiheinen induktiomoottorit, ovat yleisiä tehtaissa, koska ne voivat ajaa suuria koneita luotettavasti.Toisaalta DC-moottorit tarjoavat tarkemman nopeuden ja vääntömomentin hallinnan, mutta niitä käytetään yleensä pienemmissä, erikoistuneemmissa sovelluksissa, kuten robotiikassa, joissa hienosäädetty liike on tärkeämpää kuin raakavoima.
2. Missä moottorilla on korkea kierrosluku, AC tai DC?
DC -moottorit saavuttavat yleensä korkeammat kierroslukut (kierrokset minuutissa) kuin vaihtovirtamoottorit, etenkin pienet pysyvät magneetti- tai harjattomat tasavirtamoottorit.Tämä johtuu siitä, että DC -moottorit eivät luota voimajohtotaajuuteen ja voivat pyöriä nopeammin vain lisäämällä jännitettä.AC -moottorin nopeus on kuitenkin sidottu tulotaajuuteen ja pylväiden lukumäärään, joten se on rajoitetumpaa, ellei edistyneitä VFD -arvoja käytetä.DC-moottoreita käytetään usein, kun tarvitaan nopeaa suorituskykyä, kuten sähkötyökaluissa, drooneissa tai lääkinnällisissä laitteissa.
3. KESKUSKOTOMAT KONEET PITÄÄ PIINTEÄ kuin AC Motors?
Ei aina.AC-moottorit kestävät pidempään raskaissa ympäristöissä.Tämä johtuu siitä, että useimmissa vaihtovirtamoottoreissa, erityisesti induktiotyypeillä, on vähemmän liikkuvia osia ja ei harjoja, mikä tarkoittaa vähemmän kulumista ajan myötä.Harjatut tasavirtamoottorit kuluvat nopeammin harjojen ja kommuttorin välisen kitkan vuoksi.Harjattomilla tasavirtamoottoreilla (BLDC) on kuitenkin pitkä elinikäinen kuin AC-moottorit ja ne ovat erittäin luotettavia pienitehoisissa tai tarkkuuslaitteissa.Joten se riippuu tasavirtamoottorin tyypistä ja siitä, miten sitä käytetään.
4. Mitkä ovat AC- ja DC -moottorien haitat?
AC -moottorit voivat olla vaikeampi hallita, koska niiden nopeuden muuttaminen vaatii monimutkaisia laitteita, kuten VFD: tä.Ne eivät myöskään reagoi yhtä nopeasti signaalien hallintaan, mikä tekee niistä vähemmän ihanteellisia tehtäviin, jotka tarvitsevat nopeuden muutoksia.DC -moottorit, erityisesti harjatut, vaativat enemmän huoltoa harjan kulumisen vuoksi.Ne voivat myös olla vähemmän tehokkaita korkean tehon tasolla ja tarvitsevat elektronisia ohjaimia, kuten PWM -piirejä nopeuden hallintaan.Lisäksi he eivät usein pysty käsittelemään suuria kuormia ja AC -moottoreita ilman suuria tai ylikuumenemista.
5. Mitä voidaan käyttää nopeuden hallintaan sekä AC- että DC -moottoreilla?
AC -moottoreille muuttuvan taajuusasemia (VFD) käytetään nopeuden muuttamiseen säätämällä virtalähteen taajuutta ja jännitettä.DC -moottoreille pulssin leveyden modulaatio (PWM) on yleisin menetelmä, jossa nopeutta säädetään kytkemällä nopeasti jännite päälle ja pois päältä tehon toimittamiseen.Molemmissa tapauksissa suljetun silmukan ohjausjärjestelmät voidaan lisätä anturien avulla moottorin nopeuden seuraamiseksi ja sen säätämiseksi automaattisesti tarjoamalla yhdenmukaisen ja tarkan toiminnan vaihtelevien kuormitusten välillä.
Kaikki TMS320dm642Agnz6: sta yhdessä paikassa
21.05.2025

XCS20-3TQ144i FPGA-opas: Ominaisuudet, sovellukset, vaihtoehdot ja tietotapaukset
20.05.2025
Suositut viestit
-

COMPLECT -ohjeet Tietokoneet: Kuinka ne muuttivat tietojenkäsittelyä?
24.04.8000 147826
-

USB-C-pinout ja ominaisuudet
24.04.2000 116848
-
Xilinx Unified Simulation Primitive -sovelluksen käyttäminen: Kattava opas FPGA: n suunnitteluun ja simulointiin
24.04.1600 111382
-

Virtalähteen jännitteet elektroniikassa: VCC:n, VDD:n, VEE:n, VSS:n ja GND:n merkitys
24.04.0400 85354
-

RJ45 Connector Guide: Pinout, johdotus, kaapelityypit ja käyttö
01.01.1970 82137
-

Lopullinen opas johdon värikoodiin nykyaikaisissa sähköjärjestelmissä
Tapa, jolla sähköjärjestelmämme käyttävät värejä, ei ole vain ulkonäölle.Jokainen lankaväri osoittaa nyt tietyn toiminnon, mikä helpottaa sähkökomponenttien tunnistamista ja käsittelyä oikein asenn...01.01.1970 67770
-

Laatu (Q) tekijä: Yhtälöt ja sovellukset
Laatukerroin tai 'Q' on tärkeä tarkistettaessa, kuinka hyvin induktorit ja resonaattorit toimivat elektronisissa järjestelmissä, jotka käyttävät radiotaajuuksia (RF).'Q' mittaa kuinka hyvin piiri m...01.01.1970 64260
-

Puhdistusventtiilin opas: Toiminta, oireet, testaus ja korvaava moottorin optimaalinen suorituskyky
Puhdistusventtiili on keskeinen osa auton järjestelmää, joka auttaa pitämään ilman puhtaana hallitsemalla polttoainehöyryjä ennen kuin ne voivat paeta ilmakehään.Tämä ei vain auta ympäristöä vähent...01.01.1970 63527
-

Huippututkinnon saavuttaminen suurimmalla tehonsiirtolauseella
Suurin virransiirtolause selittää, kuinka energia lähteestä, kuten akku tai generaattori, virtaa kytkettyyn kuormaan.Se näyttää tarkan tilan, jossa kuorma vastaanottaa eniten virtaa.Tämä artikkeli ...01.01.1970 54309
-

A23 -akun tekniset tiedot ja yhteensopivuus
A23-akku on pieni, sylinterimainen akku, jolla on korkea jännite.Kutsutaan myös 23a, 23ae tai MN21, se toimii 12 voltilla ja paljon korkeampi kuin AA- tai AAA -akut.Sen erityinen muotoilu ...01.01.1970 52546
Kuuma osanumero
-

MAX158AEPI+
Analog Devices Inc./Maxim Integrated
IC ADC 8BIT FLASH 28DIP
LTC3853EUJ#TRPBF
Analog Devices Inc.
IC REG CTRLR BUCK 40QFN
18081A361JAT2A
KYOCERA AVX
CAP CER 360PF 100V NP0 1808
SMAJ78A
Meritek
TVS DIODE 78VWM 126VC
843251AGI-04LFT
Renesas Electronics America Inc
IC CLK/FREQ SYNTH 8TSSOP
W29GL064CB7A
Winbond Electronics
IC FLASH 64MBIT PARALLEL 48TFBGA
MCP6546-I/SN
Microchip Technology
IC COMPARATOR 1 GEN PUR 8SOIC
EP2S60F1020C3
Intel
IC FPGA 718 I/O 1020FBGA
UPC16315HF-AZ
Renesas Electronics America Inc
DC/DC CONVERTER
TPS76928DBVT
Texas Instruments
IC REG LINEAR 2.8V 100MA SOT23-5
SN74LVC10AD
Texas Instruments
IC GATE NAND 3CH 3-INP 14SOIC
SI4756-A10-GMR
Skyworks Solutions Inc.
RF RX AM/FM 520KHZ-1.71MHZ 32QFN
FSA8008AUMX
Fairchild Semiconductor
AUDIO/VIDEO SWITCH, PQCC10
ALE1PB24
Panasonic Electric Works
RELAY GEN PURPOSE SPST 16A 24V
SN74HC125ANSR
Texas Instruments
IC BUFFER NON-INVERT 6V 14SOP
SN75173D
Texas Instruments
IC RECEIVER 0/4 16SOIC
NLASB3157DFT2
onsemi
IC SWITCH SPDTX1 7OHM SC88
GRM033R71H152MA12J
Murata Electronics
CAP CER 1500PF 50V X7R 0201 -

VUO55-16NO7
IXYS
BRIDGE RECT 3P 1.6KV 58A PWS-B
12063G334ZAT2A
KYOCERA AVX
CAP CER 0.33UF 25V Y5V 1206
GRM1556S1H9R5DZ01D
Murata Electronics
CAP CER 9.5PF 50V S2H 0402
NA555DR
Texas Instruments
IC OSC SGL TIMER 100KHZ 8-SOIC
SN74CBT3257DBR
Texas Instruments
IC MUX/DEMUX 4 X 2:1 16SSOP
TRS232ECPW
Texas Instruments
IC TRANSCEIVER FULL 2/2 16TSSOP
MAX17880GUU/V+
Analog Devices Inc./Maxim Integrated
IC BATT 12CH HIGH VOLT BATT
1N3996A
Solid State Inc.
10 WATT ZENER DO-4
UCC38C40DGKR
Texas Instruments
IC REG CTRLR MULT TOP 8VSSOP
XC6206P332DR-G
Torex Semiconductor Ltd
IC REG LINEAR 3.3V 200MA 6USPB
8530FY-01LF
Renesas Electronics America Inc
IC CLK BUFFER 1:16 500MHZ 48TQFP
CD74HC4067M
Texas Instruments
IC MUX 16:1 160OHM 24SOIC
KT11P2SA2M34LFS
C&K
SWITCH TACTILE SPST-NO 1VA 32V
LA5757TP-TL-E
onsemi
IC REG BUCK ADJ 1.6A TP5HFA
LAN8710A-EZC-TR
Microchip Technology
IC TRANSCEIVER FULL 4/4 32QFN
SMBJ120A
Meritek
TVS DIODE 120VWM 193VC
SMMUN2116LT1G
onsemi
TRANS PREBIAS PNP 50V SOT23-3
LTC3375IUK#PBF
Analog Devices Inc.
IC REG BUCK ADJ 1A 8OUT 48QFN -

1812WA181JAT1A\SB
KYOCERA AVX
CAP CER 180PF 2.5KV NP0 1812
ADS5120CGHK
Texas Instruments
IC ADC 10BIT PIPELINED 257BGA
C1608X8R1H473K080AA
TDK Corporation
CAP CER 0.047UF 50V X8R 0603
AD7248AANZ
Analog Devices Inc.
IC DAC 12BIT V-OUT 20DIP
XCKU060-2FFVA1156E
AMD
IC FPGA 520 I/O 1156FCBGA
SPC5602BK0MLL4
Freescale Semiconductor
IC MCU 32BIT 256KB FLASH 100LQFP
LH1525AT
Vishay Semiconductor Opto Division
SSR RELAY SPST-NO 250MA 0-400V
BQ24113RHLR
Texas Instruments
IC BATT CHG LI-ION 1-2CEL 20VQFN
STD5NK50Z-1
STMicroelectronics
MOSFET N-CH 500V 4.4A IPAK
PDS3200-13
Diodes Incorporated
DIODE SCHOTTKY 200V 3A POWERDI5
0251005.MAT1L
Littelfuse Inc.
FUSE BRD MNT 5A 125VAC/VDC AXIAL
FDS6675A
Fairchild Semiconductor
MOSFET P-CH 30V 11A 8SOIC
IRF7752TRPBF
Infineon Technologies
MOSFET 2N-CH 30V 4.6A 8TSSOP
DSPIC33FJ32MC202-H/MM
Microchip Technology
IC MCU 16BIT 32KB FLASH 28QFN
ADV471KP50
Analog Devices Inc.
IC DAC 6, 8 BIT A-OUT 44PLCC
MAX8877EUK15+
Analog Devices Inc./Maxim Integrated
IC REG LINEAR LOW NOISE LDO
MAX406ACSA
Analog Devices Inc./Maxim Integrated
IC OPAMP GP 1 CIRCUIT 8SOIC
R3112N271A-TR-FE
Nisshinbo Micro Devices Inc.
IC SUPERVISOR 1 CHANNEL SOT23-5